Chceme propustit signál ![]() šířící se kolmo na řadu viz.
Obr. 12.1a,
tedy s DOA
(Direction of Arrival)
šířící se kolmo na řadu viz.
Obr. 12.1a,
tedy s DOA
(Direction of Arrival)
![]() a ostatní signály (s odlišným
směrem šíření,
a ostatní signály (s odlišným
směrem šíření,
![]() ) potlačit (například signál
) potlačit (například signál ![]() ).
).
Za tímto účelem umístíme za senzory řady adaptivní filtr se strukturou
viz. Obr. 12.1a.
Za každým z ![]() senzorů řady je umístěn transverzální filtr
s
senzorů řady je umístěn transverzální filtr
s ![]() vahami. Výstupy těchto filtrů jsou pak sečteny do jediného chybového
výstupu
vahami. Výstupy těchto filtrů jsou pak sečteny do jediného chybového
výstupu ![]() .
Pro účely dalšího výkladu zaveďme vektor vah
.
Pro účely dalšího výkladu zaveďme vektor vah
![]() a
vektor signálů na zpožděních
a
vektor signálů na zpožděních
![]()
Otázkou zůstává jak nastavovat váhy
![]() .
Minimalizací rozptylu (výkonu) na chybovém výstupu
.
Minimalizací rozptylu (výkonu) na chybovém výstupu ![]() ,
sice docílíme potlačení rušivých signálů, ale triviální řešení
(všechny váhy nulové) vede i k potlačení užitečného signálu
,
sice docílíme potlačení rušivých signálů, ale triviální řešení
(všechny váhy nulové) vede i k potlačení užitečného signálu ![]() .
Přidáme tedy okrajovou podmínku na hodnoty vah, aby
.
Přidáme tedy okrajovou podmínku na hodnoty vah, aby ![]() (signál
šířící se kolmo na řadu) prošel bez zkreslení.
(signál
šířící se kolmo na řadu) prošel bez zkreslení.
Jak se struktura chová z pohledu signálu ![]() .
Protože se
.
Protože se ![]() šíří kolmo na řadu jsou příspěvky
od
šíří kolmo na řadu jsou příspěvky
od ![]() na všech senzorech stejné. Tyto příspěvky se pak
v dalších krocích kopírují na další zpoždění. V každém sloupci struktury
Obr. 12.1a
jsou tedy shodné příspěvky signálu
na všech senzorech stejné. Tyto příspěvky se pak
v dalších krocích kopírují na další zpoždění. V každém sloupci struktury
Obr. 12.1a
jsou tedy shodné příspěvky signálu ![]() . Zhlediska
. Zhlediska ![]() můžeme tedy
sloupce propojit, výsledná struktura je uvedena na
Obr. 12.1b, jedná se o
jediný transverzální filtr délky
můžeme tedy
sloupce propojit, výsledná struktura je uvedena na
Obr. 12.1b, jedná se o
jediný transverzální filtr délky ![]() jehož váhy jsou součtem vah
původní struktury v odpovídajícím sloupci.
jehož váhy jsou součtem vah
původní struktury v odpovídajícím sloupci.
Okrajovou podmínku získáme tak, že fixujeme váhy vzniklého filtru
(impulsovou odezvu filtru z hlediska ![]() ) na Dirakův impulz
(chceme, aby
) na Dirakův impulz
(chceme, aby ![]() prošel bez zkleslení).
prošel bez zkleslení).
Nyní shrnu předešlé úvahy.
Váhy budeme nastavovat tak, abychom minimalizovali rozptyl
![]() na chybovém výstupu (opět předpokládáme, že
proces
na chybovém výstupu (opět předpokládáme, že
proces
![]() mé nulovou střední hodnotu), při platnosti
okrajové podmínky (12.6). Jedná se vlastně o hledání vázaného
extrému.
Výsledný adaptivní algoritmus se
nazývá LMS s lineárními okrajovými podmínkami.
mé nulovou střední hodnotu), při platnosti
okrajové podmínky (12.6). Jedná se vlastně o hledání vázaného
extrému.
Výsledný adaptivní algoritmus se
nazývá LMS s lineárními okrajovými podmínkami.
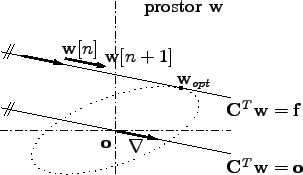
Trajektorie vah ve váhovém prostoru je naznačena na obrázku
Obr. 12.2.
Množina přípustných vah je omezena
pouze na podprostor
![]() (přímka na obrázku). Váhy se pohybují ve směru vázaného gradientu,
jehož hodnoty jsou omezeny pouze na lineární podprostor
(přímka na obrázku). Váhy se pohybují ve směru vázaného gradientu,
jehož hodnoty jsou omezeny pouze na lineární podprostor
![]() (na obrázku přímka procházející
počátkem rovnoběžná s přímkou
(na obrázku přímka procházející
počátkem rovnoběžná s přímkou
![]() ).
).
Z toho vyplývají špatné numerické vlastnosti LMS algoritmu
s okrajovými podmínkami.
"Vyjede-li"
![]() v důsledku kumulativní chyby
(nové váhy se získají jako staré opravené
o
v důsledku kumulativní chyby
(nové váhy se získají jako staré opravené
o ![]() násobek vázaného gradientu)
z podprostoru
násobek vázaného gradientu)
z podprostoru
![]() (kde jsou splněny okrajové
podmínky) vázaný gradient tuto chybu neumí opravit viz. Obr. 12.2.
S rostoucím počtem iterací tedy vzdálenost
(kde jsou splněny okrajové
podmínky) vázaný gradient tuto chybu neumí opravit viz. Obr. 12.2.
S rostoucím počtem iterací tedy vzdálenost
![]() od
podprostoru
od
podprostoru
![]() stále roste.
stále roste.
Efektivní řešení problému uvedl až Frost (včetně korigovaných
horních mezí pro ![]() ).
Navržené řešení spočívá v promítnutí
).
Navržené řešení spočívá v promítnutí
![]() na podprostor
na podprostor
![]() v každé iteraci (
v každé iteraci (
![]() se přiřadí nejbližší váha splňjící
okrajovou podmínku
se přiřadí nejbližší váha splňjící
okrajovou podmínku
![]() ).
).
![\begin{figure}\begin{center}
\pstexfig[a]{a12frost1}\\
\pstexfig[b]{a12frost2}\\
\end{center}
\end{figure}](img867.png)
![\begin{equation*}\begin{aligned}\mathbf{w}^T[n] &= [ w_1[n],w_2[n],\ldots,w_{JK}...
...dots ,x_1[n-J+1],x_2[n-J+1], \ldots,x_K[n-J+1]]. \\ \end{aligned}\end{equation*}](img869.png)
![\begin{equation*}\begin{aligned}\sum_{k=1}^{K} w_k[n] &= 1, \\ \sum_{k=K+1}^{2K}...
..., \\ &\vdots\\ \sum_{k=JK-K+1}^{JK} w_k[n] &= 0. \\ \end{aligned}\end{equation*}](img871.png)
![\begin{equation*}\begin{aligned}\mathbf{C} &= [ \mathbf{c}_1,\mathbf{c}_2,\ldots...
...{f}^T &= [ f_1,f_2,\ldots,f_J] =[ 1,0,\ldots,0], \\ \end{aligned}\end{equation*}](img875.png)
![$\displaystyle \mathbf{c}_i = [ \underbrace{0 \ldots 0}_{\text{$K(i-1)$\ nul}}\;...
...ext{$K$\ jedniček}}\;\;\;\; \underbrace{0 \ldots 0}_{\text{$K(K-i)$\ nul}} ] .$](img877.png)