


Next: 6.2 CMA
Up: 6. Cvičení 6: Ekvalizace
Previous: 6. Cvičení 6: Ekvalizace
Subsections
V tomto cvičení se budeme zabývat problémem ekvalizace přenosové
linky.
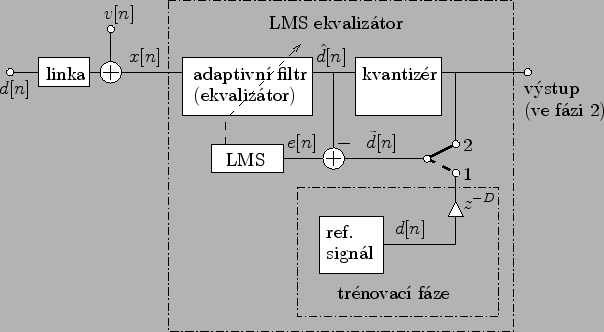
Struktura LMS ekvalizátoru je na Obr. 6.1.
Figure 6.1:
Struktura LMS ekvalizátoru
 |
Budeme předpokládat datový signál pouze s dvěma úrovněmi  .
Označme řád adaptivního filtru
.
Označme řád adaptivního filtru  . Zavedeme vektor vzorků
vstupního signálu na zpožděních adaptivního fitru a vektor vah
. Zavedeme vektor vzorků
vstupního signálu na zpožděních adaptivního fitru a vektor vah
![$\displaystyle \mathbf{x}^T[n] = [ x[n], x[n-1], \ldots, x[n-M] ], \mathbf{w}^T[n] = [ w_1, w_2, \ldots, w_{M+1} ]$](img317.png) |
(6.1) |
Rovnice filtrace pak má tvar
![\begin{displaymath}\begin{gathered}\hat{d}[n] = \mathbf{w}^T[n]\mathbf{x}[n], \\ e[n] = \tilde{d}[n] -\hat{d}[n] \end{gathered}\end{displaymath}](img318.png) |
(6.2) |
V trénovací fázi (přepínač v poloze 1)
je
![$ \tilde{d}[n]$](img319.png) přímo čistým (maximálně zpožděným)
datovým signálem
přímo čistým (maximálně zpožděným)
datovým signálem
![$ d[n-D]$](img320.png) (zpoždění
(zpoždění  je vhodné zavést kvůli kompenzaci
zpoždění linky - umíme postavit pouze kauzální ekvalizátor).
Není tedy funkcí
je vhodné zavést kvůli kompenzaci
zpoždění linky - umíme postavit pouze kauzální ekvalizátor).
Není tedy funkcí
![$ \mathbf{w}[n]$](img233.png) (na gradient
(na gradient
![$ \nabla_{\mathbf{w}[n]}e^2[n]$](img321.png) tedy nemá vliv).
Rovnice pro úpravu vah má pak tvar
tedy nemá vliv).
Rovnice pro úpravu vah má pak tvar
![$\displaystyle \mathbf{w}[n+1] = \mathbf{w}[n] + \mu \nabla_{\mathbf{w}[n]}e^2[n] = \mathbf{w}[n] + \mu e[n] \mathbf{x}[n]$](img322.png) |
(6.3) |
Po ukončení trénovací fáze by již váhy měly být ustáleny tak
aby přenosová funkce ekvalizátoru (adaptivní filtr) byla inverzní
k přenosové funkci linky až na zpoždění .
Takže kvantizér je schopen spolehlivě (předpokládáme, že variance
aditivního šumu je dostatečně nízká) rekonstruovat stavy datového
signálu.
V této chvíli již můžeme čistý datový signál odebírat přímo
z výstupu kvantizéru. Přepneme tedy přepínač do polohy 2 (druhá fáze).
Rovnice pro úpravu vah nyní dopadnou naprosto stejně, neboť stále
předpokládáme, že
je čistý datový signál nikoli
funkce
.
Z uvedeného plyne, že v druhé fázi je LMS schopno sledovat pouze
pomalé změny linky (chyba v odhadu
![$ \hat{d}[n]$](img323.png) nám umožní správně nastavit
adaptivní filtr a tím ekvalizovat linku, ale je malá na to,
aby se projevila za kvantizérem). Jestliže se stane že se chyba v
odhadu
projeví i za kvantizérem (kvůli skokové změně přenosové
funkce linky nebo velkému aditivnímu šumu), je předpoklad, že na výstupu
kvantizéru je čistý datový signál nesprávný a celá rovnice pro úpravu
vah tedy nesmyslná. Váhy se nám sice nějak upravují,
ale směr gradientu je špatný (nemá nic společného s ekvalizací linky).
nám umožní správně nastavit
adaptivní filtr a tím ekvalizovat linku, ale je malá na to,
aby se projevila za kvantizérem). Jestliže se stane že se chyba v
odhadu
projeví i za kvantizérem (kvůli skokové změně přenosové
funkce linky nebo velkému aditivnímu šumu), je předpoklad, že na výstupu
kvantizéru je čistý datový signál nesprávný a celá rovnice pro úpravu
vah tedy nesmyslná. Váhy se nám sice nějak upravují,
ale směr gradientu je špatný (nemá nic společného s ekvalizací linky).
Cvičení 6.0:
Datový signál ![$ d[n]$](img21.png) modelujte jako doustavový s úrovněmi v
modelujte jako doustavový s úrovněmi v  a
a  .
Vzorky nechť jsou nezávisle identicky rozložené s rovnoměrným
rozložením na
.
Vzorky nechť jsou nezávisle identicky rozložené s rovnoměrným
rozložením na  .
Aditivní šum
.
Aditivní šum ![$ v[n]$](img95.png) modelujte jako bílý stacionární gausovský proces
s nolovou střední hodnotou a variancí
modelujte jako bílý stacionární gausovský proces
s nolovou střední hodnotou a variancí
 .
Linku modelujte all-pole filtrem 2. řádu s póly v
.
Linku modelujte all-pole filtrem 2. řádu s póly v
 .
Vypočtěte
.
Vypočtěte ![$ x[n]$](img1.png) viz. Obr. 6.1.
Délky všech posloupností volte
viz. Obr. 6.1.
Délky všech posloupností volte  .
.
Napište skript v Matlabu implementující strukturu LMS ekvalizátoru viz.
Obr. 6.1.
Implementujte pouze fázi 2 (vynechte zatím trénovací fázi).
Konvergenční konstantu  volte opět mu = 0.1/((M+1)*rxx0).
Řád adaptivního filtru
volte opět mu = 0.1/((M+1)*rxx0).
Řád adaptivního filtru  .
Počáteční hodnoty vah volte jako jednotkový impuls (
projde bezezměny na výstup adaptivního filtru
).
.
Počáteční hodnoty vah volte jako jednotkový impuls (
projde bezezměny na výstup adaptivního filtru
).
Vyneste
frekvenční charakteristiku přenosové linky.
Pro ustálený stav vyneste (např. posledních 50 vzorků):
čistý datový signál ,
vstupní signál ,
odhad
,
a výstup kvantizéru
(porovnejte s ).
Dále si vyneste průběh vah,
a frekvenční charakteristiku adaptivního filtru v ustáleném stavu
(porovnejte s frekvenční charakteristikou linky).
Uvádím zde opět pouze skript na modelování vstupního signálu, skript pro
LMS ekvalizátor napište sami.
N = 2000; % delka
% cista data
d = sign(sign((rand(N,1) - 0.5)+0.1);
link_pol_r = 0.8; % IIR 2. rad (komplexne sdruzene poly)
link_pol_W = pi/4;
a = link_pol_r*exp(j*link_pol_W);
link_vykon = 2 / (abs(a)^2-1) * real( a/(a-conj(a))/(a^2-1) );
link_A = [ 1; -2*link_pol_r*cos(link_pol_W); link_pol_r^2 ];
link_B = [ 1; 0; 0 ]/sqrt(link_vykon);
% aditivni ruseni v[n]
sigma_v = 0.3; % rozptyl 0.3^2
v = sigma_v*randn(N,1);
% vstupni signal
x = filter(link_B,link_A,d) + v;
Vzhledem k tomu, že posloupnost za kvantizérem
se od
čistého datového signálu může lišit zpožděním nebo polaritou
(platí hlavně pro dále uvedený CMA ekvalizér) může být určení
shody obou posloupností docela obtížné.
Jednodušší je určit výkon odchylky
v ustáleném stavu od různě zpožděného (případně invertovaného)
a hnedka poznáme pro které zpoždění se obě posloupnosti (nejvíce)
shodují. Lze to provést například takto
Dmax = 10
L = 50;
Rl = N-L;
Rh = N-1;
po = zeros(Dmax+1,1);
for k = 0:Dmax;
po(k+1) = min( sum(( dt(Rl:Rh)-d(Rl-k:Rh-k) ).^2)/L, ...
sum(( dt(Rl:Rh)+d(Rl-k:Rh-k) ).^2)/L );
end;
Výsledky:
Figure 6.2:
Linka (IIR s modulem polů 0.5,
):
(zleva doprava)
Modulová frekvenční charakteristika linky,
nuly a póly přenosové funkce linky,
fázová frekvenční charakteristika linky,
čistý datový signál ,
vstup z ekvalizéru
|
|
Figure 6.3:
LMS ekvalizátor bez trénovací fáze
(Linka IIR s modulem polů 0.5,
, ,  ):
čistý datový signál ,
vstupní signál ,
odhad
,
výstup kvantizéru
,
):
čistý datový signál ,
vstupní signál ,
odhad
,
výstup kvantizéru
,
|
|
Figure 6.4:
LMS ekvalizátor bez trénovací fáze
(Linka IIR s modulem polů 0.5,
, , ):
(zleva doprava)
průběh vah,
výkon odchylky  na zpoždění,
modulová frekvenční charakteristika adaptivního filtru v ustáleném stavu
a linky v decibelech, nuly a póly přenosové funkce adaptivního filtru
v ustáleném stavu.
na zpoždění,
modulová frekvenční charakteristika adaptivního filtru v ustáleném stavu
a linky v decibelech, nuly a póly přenosové funkce adaptivního filtru
v ustáleném stavu.
|
|
Poznámka: Na chování LMS ekvalizátoru bez použití trénovací fáze
(pouze fáze 2) si můžete ověřit jak veké skokové změny přenosové
linky je LMS ekvalizér schopen sledovat.
Můžete si totiž představit, že linka na počátku skokově změnila svou
přenosovou funkci z přenosu bez zkreslení a zesílení
(inverze k počátečnímu nastavení adaptivního filtru)
na přenosovou funkci uvedenou v zadání.
Cvičení 6.1: Varianci aditivního šumu nyní volte
 .
Póly linky volte
.
Póly linky volte
 .
.
Implementujte trénovací fázi. Délku trénovací fáze volte  vzorků.
Jako referenční posloupnost použijte nezpožděný čistý datový signál
, .
vzorků.
Jako referenční posloupnost použijte nezpožděný čistý datový signál
, .
Porovnejte výsledky s použitím i bez použití trénovací fáze.
Trénovací fázi můžete např. implementovat podmínkou v těle smyčky
LMS ekvalizátoru (dt(n) má význam
).
for n = M+1:N-1 % smycka LMS ekvalizátoru
.
.
.
% po vypoctu dt(n)
if (n<T)
dt(n) = d(n-D);
end
e(n) = dt(n) - do(n);
.
.
.
end; % n
Výsledky:
Figure 6.5:
Linka (IIR s modulem polů 0.8,
):
(zleva doprava)
Modulová frekvenční charakteristika linky,
nuly a póly přenosové funkce linky,
fázová frekvenční charakteristika linky,
čistý datový signál ,
vstup z ekvalizéru
|
|
Figure 6.6:
LMS ekvalizátor bez trénovací fáze
(Linka IIR s modulem polů 0.8,
, , ):
(zleva doprava)
průběh vah,
výkon odchylky na zpoždění,
modulová frekvenční charakteristika adaptivního filtru v ustáleném stavu
a linky v decibelech, nuly a póly přenosové funkce adaptivního filtru
v ustáleném stavu.
|
|
Figure 6.7:
LMS ekvalizátor s trénovací fází
(Linka IIR s modulem polů 0.8,
, , ):
(zleva doprava)
průběh vah,
výkon odchylky na zpoždění,
modulová frekvenční charakteristika adaptivního filtru v ustáleném stavu
a linky v decibelech, nuly a póly přenosové funkce adaptivního filtru
v ustáleném stavu.
|
|
Next: 6.2 CMA
Up: 6. Cvičení 6: Ekvalizace
Previous: 6. Cvičení 6: Ekvalizace
Mirek
2006-12-12
![\includegraphics[width=10cm]{ada6/obrmat/fig1.ps}](img326.png)
![\includegraphics[width=10cm]{ada6/obrmat/fig2.ps}](img327.png)
![\includegraphics[width=10cm]{ada6/obrmat/fig3.ps}](img328.png)
![\includegraphics[width=10cm]{ada6/obrmat/fig4.ps}](img331.png)
![\includegraphics[width=10cm]{ada6/obrmat/fig5.ps}](img332.png)
![\includegraphics[width=10cm]{ada6/obrmat/fig6.ps}](img333.png)