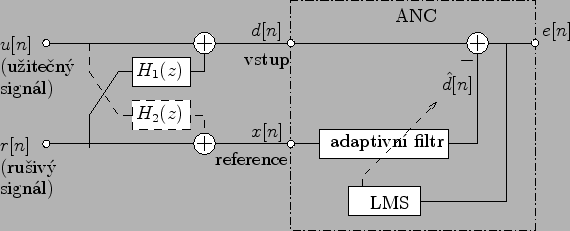
Struktura ANC je na Obr. 9.1
Za tímto účelem umístíme mikrofon (vstupní signál ![]() )
co nejblíže mluvčímu.
Mikrofon ale snímá i část rušení
)
co nejblíže mluvčímu.
Mikrofon ale snímá i část rušení ![]() .
Proto umístíme ještě jeden mikrofon (referenční vstup
.
Proto umístíme ještě jeden mikrofon (referenční vstup ![]() )
poblíž zdroje rušení
)
poblíž zdroje rušení ![]() , aby jsme ho co nejvěrněji zachytili
s tím, že se nám ho později podaří od směsi na vstupu
, aby jsme ho co nejvěrněji zachytili
s tím, že se nám ho později podaří od směsi na vstupu ![]() odečíst a
získat tak čistý užitečný signál.
odečíst a
získat tak čistý užitečný signál.
O příspěveku od ![]() k signálu
k signálu ![]() na referenčním vstupu předpokládáme,
že je přímo roven
na referenčním vstupu předpokládáme,
že je přímo roven ![]() (referenční mikrofon je přímo u zdroje rušení).
Podobně předpokládáme, že příspěvek užitečného signálu
(referenční mikrofon je přímo u zdroje rušení).
Podobně předpokládáme, že příspěvek užitečného signálu ![]() k
vstupnímu signálu
k
vstupnímu signálu ![]() je přimo roven
je přimo roven ![]() (vstupní mikrofon
(vstupní mikrofon ![]() je přímo u zdroje užitečného signálu).
Přenosová cesta
od zdroje rušení na vstup
je přímo u zdroje užitečného signálu).
Přenosová cesta
od zdroje rušení na vstup ![]() je modelována LTI systémem
s přenosovou funkcí
je modelována LTI systémem
s přenosovou funkcí ![]() . Přenosová cesta od zdroje užitečného
signálu na referenční vstup je modelována LTI systémem
s přenosovou funkcí
. Přenosová cesta od zdroje užitečného
signálu na referenční vstup je modelována LTI systémem
s přenosovou funkcí ![]() .
.
Předpokládejme nejprve, že přenosová funkce ![]() je nulová.
Na vstupu
je nulová.
Na vstupu
![]() je přítomna směs užitečného
signálu
je přítomna směs užitečného
signálu ![]() a příspěvku od rušivého signálu
a příspěvku od rušivého signálu ![]() .
Naším cílem je rušení ze směsi odstranit.
K dispozici máme referenční vstup
.
Naším cílem je rušení ze směsi odstranit.
K dispozici máme referenční vstup
![]() , na kterém se v ideálním
případě vyskytuje pouze šum (bez
, na kterém se v ideálním
případě vyskytuje pouze šum (bez ![]() ).
V případě, že
).
V případě, že ![]() (
(![]() ) a
) a ![]() jsou nekorelovány, minimalizuje
LMS výkon na výstupu
jsou nekorelovány, minimalizuje
LMS výkon na výstupu ![]() tím, že nastaví váhy adaptivního filtru tak,
aby přenosová funkce adaptivního filtru byla shodná s
tím, že nastaví váhy adaptivního filtru tak,
aby přenosová funkce adaptivního filtru byla shodná s ![]() , čímž se
rušení na chybovém výstupu
, čímž se
rušení na chybovém výstupu ![]() vykompenzuje.
vykompenzuje.
Dalo by se říci, že se vlastně jedná o úlohu identifikace, kterou
jsme probírali na 4. cvičení.
Jediný rozdíl v obou úlohách je pouze v tom, že v úloze identifikace
je cílem odhadnout přenosovou funkci neznámého systému (zde ![]() )
a v úloze ANC je cílem potlačit rušení. Tedy úloha potlačení echa v
automobilu je spíše ANC než identifikace.
Podíváme se zde ale také na věci, které jste si na uvedené úloze
ještě nevyzkoušeli. Předně vliv přítomnosti
)
a v úloze ANC je cílem potlačit rušení. Tedy úloha potlačení echa v
automobilu je spíše ANC než identifikace.
Podíváme se zde ale také na věci, které jste si na uvedené úloze
ještě nevyzkoušeli. Předně vliv přítomnosti ![]() na SNRE
(Signal to Noise Ratio Enhancement) a vliv (vysokého) SNR na vstupu
na SNRE
(Signal to Noise Ratio Enhancement) a vliv (vysokého) SNR na vstupu ![]() na funkci adaptivního filtru.
na funkci adaptivního filtru.
Cvičení 9.0: Jako užitečný signál ![]() si stáhněte
tento řečový signál
(použijte pouze prvních
si stáhněte
tento řečový signál
(použijte pouze prvních ![]() ).
Vygenerujte barevný šum (AR model 2. řádu - komplexně sdružené póly:
).
Vygenerujte barevný šum (AR model 2. řádu - komplexně sdružené póly:
![]() ,
,
![]() ) s normovaným
rozptylem na 1. Jako rušení pak volte tento barevný šum dodatečně zesílený
r_zes-krát, kde
) s normovaným
rozptylem na 1. Jako rušení pak volte tento barevný šum dodatečně zesílený
r_zes-krát, kde
Napište skript v Matlabu impementující strukturu ANC Obr. 9.1.
Řád adaptivního filtru volte ![]() . Konvergenční konstantu
volte opět mu = 0.1/((M+1)*rxx0) (viz. (7.1)
pro missadjustment
. Konvergenční konstantu
volte opět mu = 0.1/((M+1)*rxx0) (viz. (7.1)
pro missadjustment
![]() ).
).
Pro všechny body A1, A2, B1, B2,
C1, C2:
Vyneste průběh vah na čase, vyneste spektrogramy
užitečného signálu ![]() , vstupního signálu
, vstupního signálu ![]() a výstupního
a výstupního ![]() (a poslechněte si je). Dále vždy
spočtěte SNR na vstupu
(a poslechněte si je). Dále vždy
spočtěte SNR na vstupu ![]() , SNR na výstupu
, SNR na výstupu ![]() a dosažené
SNRE. Rovněž vyneste impulsovou odezvu adaptivního filtru v ustáleném
stavu a porovnejte ji s impulsovou odezvou
a dosažené
SNRE. Rovněž vyneste impulsovou odezvu adaptivního filtru v ustáleném
stavu a porovnejte ji s impulsovou odezvou ![]() .
.
Pokuste se odpovědět na následující otázky:
Proč zavedení vazby ![]() (z
(z ![]() na
na ![]() ) vede ke zhoršení
SNRE?
Proč s rostoucím SNR na vstupu
) vede ke zhoršení
SNRE?
Proč s rostoucím SNR na vstupu ![]() (s klesajícím výkonem rušení) SNRE
klesá?
(s klesajícím výkonem rušení) SNRE
klesá?
Uvádím zde pouze skript na výpočet SNRE (podobně jako u ALE):
Pu1 = sum(u.^2)/N; % vykon uzitecneho sig. na vstupu Pn1 = sum((d-u).^2)/N; % vykon ruseni na vstupu Pu2 = sum(u.^2)/N; % vykon uzitecneho sig. na vystupu Pn2 = sum((e-u).^2)/N; % vykon ruseni na vystupu SNR1 = 10*log(Pu1/Pn1); SNR2 = 10*log(Pu2/Pn2); SNRE = SNR2-SNR1;
Výsledky pro r_zes = 4:
![\includegraphics[width=10cm]{ada9/obrmat/fig1.ps}](img654.png)
|
![\includegraphics[width=10cm]{ada9/obrmat/fig2.ps}](img657.png)
|
![\includegraphics[width=10cm]{ada9/obrmat/fig3.ps}](img658.png)
|
Výsledky pro r_zes = 1:
![\includegraphics[width=10cm]{ada9/obrmat/fig4.ps}](img659.png)
|
![\includegraphics[width=10cm]{ada9/obrmat/fig5.ps}](img660.png)
|
Výsledky pro r_zes = 0.1:
![\includegraphics[width=10cm]{ada9/obrmat/fig6.ps}](img661.png)
|
![\includegraphics[width=10cm]{ada9/obrmat/fig7.ps}](img662.png)
|
Nyní si vyneseme tabulku 9.1
dosažených SNRE pro jednotlivá r_zes a
typy ![]() . Rovněž uvedu pokles SNRE vlivem přítomnosti
. Rovněž uvedu pokles SNRE vlivem přítomnosti ![]() (označeno
(označeno
![]() ).
).
|
Problém je, že váhový vektor není fixován na optimální hodnotu
ale vykazuje rozptyl (gradientní šum).
Vlivem gradientního šum je skutečné MSE o něco vyšší než MSE pro
optimální nastavení vah (volíme-li ![]() podle (7.1)
a zvolíme-li zde
missadjustment
podle (7.1)
a zvolíme-li zde
missadjustment
![]() - běžná hodnota,
mělo by dojít ke zvýšení zhruba o 10 procent).
Pak se stane, že výkon příspěvku k
- běžná hodnota,
mělo by dojít ke zvýšení zhruba o 10 procent).
Pak se stane, že výkon příspěvku k ![]() vlivem gradientního
šumu je mnohem větší než výkon příspěvku rušení na vstupu
vlivem gradientního
šumu je mnohem větší než výkon příspěvku rušení na vstupu ![]() .
.
Cvičení 9.1: Jak byste modifikovali strukturu ANC Obr. 9.1
víte-li, že SNR na vstupu
![]() bude vždy větší než 0 (rušení má ve směsi
bude vždy větší než 0 (rušení má ve směsi ![]() vždy
menší zastoupení než užitečný signál)?
vždy
menší zastoupení než užitečný signál)?