V této části budu vynechávat označení ![]() u váhového vektoru,
bude to přehlednější.
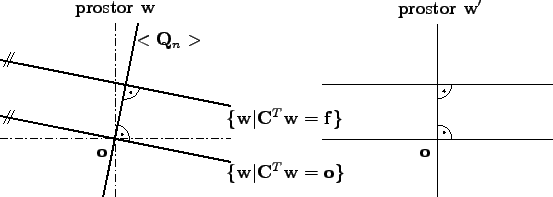
Podíváme se nyní na jiné řešení uvedeného problému.
Pokusíme se celý prostor vah otočit tak (viz. Obr. 12.3), aby
lineární podprostor
u váhového vektoru,
bude to přehlednější.
Podíváme se nyní na jiné řešení uvedeného problému.
Pokusíme se celý prostor vah otočit tak (viz. Obr. 12.3), aby
lineární podprostor
![]() po transformaci
odpovídal lineárnímu obalu
po transformaci
odpovídal lineárnímu obalu
![]() 12.1vektorů standardní báze.
Jinými slovy, aby část souřadnic transformovaného váhového vektoru
12.1vektorů standardní báze.
Jinými slovy, aby část souřadnic transformovaného váhového vektoru
![]() byla přímo určena okrajovými podmínkami, a naopak aby na zbývající
souřadnice nebyly uvaleny žádné okrajové podmínky.
To má výhodu v tom, že souřadnice
byla přímo určena okrajovými podmínkami, a naopak aby na zbývající
souřadnice nebyly uvaleny žádné okrajové podmínky.
To má výhodu v tom, že souřadnice
![]() bez okrajových podmínek lze upravovat pomocí LMS bez
okrajových podmínek, čímž se zamezí výše zmíněným chybám (zbytek
souřadnic je daný okrajovými podmínkami
a nemusí se tedy upravovat vůbec - je fixní).
bez okrajových podmínek lze upravovat pomocí LMS bez
okrajových podmínek, čímž se zamezí výše zmíněným chybám (zbytek
souřadnic je daný okrajovými podmínkami
a nemusí se tedy upravovat vůbec - je fixní).
Pokusíme se transformaci uvedených vlastností nalézt.
Nejprve ale nalezneme ortonormální bázi k lineárnímu obalu
sloupců matice
![]() (lineární obal sloupců matice budu dále značit
(lineární obal sloupců matice budu dále značit
![]() ) a jeho ortogonálnímu doplňku.
Tedy takovou ortonormální bázi
) a jeho ortogonálnímu doplňku.
Tedy takovou ortonormální bázi
![]() (vektory báze
seřadím do ortonormální matice
(vektory báze
seřadím do ortonormální matice
![]() )
)
Transformace
![]() transformuje standardní
bázi (sloupce
transformuje standardní
bázi (sloupce
![]() )
na bázi složenou z sloupcových vektorů
)
na bázi složenou z sloupcových vektorů
![]()
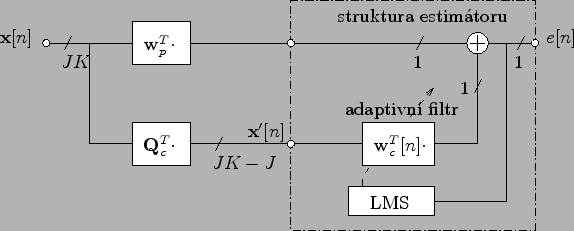
Abychom mohli zakreslit novou strukturu s transformovanými vahami
dosadíme z (12.10)
do rovnice filtrace (12.2). Nyní již opět začnu vyznačovat
u vah závislost na diskrétním čase ![]() . Jak jsme již uvedli,
u transformovaného váhového vektoru lze měnit pouze část
. Jak jsme již uvedli,
u transformovaného váhového vektoru lze měnit pouze část
![]() , část
, část
![]() je jednoznačně určena okrajovými
podmínkami a je tedy konstantní proto zde závislost na čase nevyznačuji.
je jednoznačně určena okrajovými
podmínkami a je tedy konstantní proto zde závislost na čase nevyznačuji.
Váhy
![]() nejsou okrajovými podmínkami nijak omezeny
proto na jejich úpravu mohu
použít obyčejné LMS bez okrajových podmínek.
Z (12.13) určíme gradient
nejsou okrajovými podmínkami nijak omezeny
proto na jejich úpravu mohu
použít obyčejné LMS bez okrajových podmínek.
Z (12.13) určíme gradient
Celý LMS algoritmus pro GSC je shrnut v následující tabulce:
Cvičení 12.0: Napište skript v Matlabu implementující strukturu GSC viz. Obr. 12.4
váhy nastavujte pomocí LMS viz. tabulka 12.1
konvergenční konstantu volte mu = 0.1/((J*K-J)*rxx0).
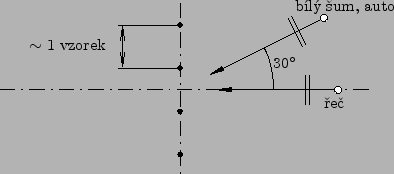
Senzorové pole se skládá z ![]() senzorů umístěných
rovnoměrně v řadě (Uniform Linear Array - ULA).
Vzdálenost mezi sousedními senzory odpovídá jednomu vzorku.
K dispozici jsou následující signály sejmuté na senzorech
(signály se šíří s rovinnou vlnoplochou):
senzorů umístěných
rovnoměrně v řadě (Uniform Linear Array - ULA).
Vzdálenost mezi sousedními senzory odpovídá jednomu vzorku.
K dispozici jsou následující signály sejmuté na senzorech
(signály se šíří s rovinnou vlnoplochou):
| signál | zpoždění mezi sousedními senzory | úhel dopadu |
| řeč | 0 vzorků | |
| bílý šum |
|
Uvádím skript na generování matice
![]() a vektoru
a vektoru
![]() ,
dále výpočet matic
,
dále výpočet matic
![]() a
a
![]() pomocí QR-rozkladu
matice
pomocí QR-rozkladu
matice
![]() :
:
C = zeros(J*K,J);
for c=1:J
C((c-1)*K+1:c*K,c) = ones(K,1);
end;
f = [ zeros(1,floor(J/2)) 1 zeros(1,floor(J/2)) ]';
[ Q R ] = qr(C);
Qn = Q(:,1:J);
Qc = Q(:,J+1:J*K);
wn = inv(C'*Qn)*f;
wp = (wn'*Qn')';
![\includegraphics[width=10cm]{ada12/obrmat/fig1.ps}](img913.png)
|
![\begin{displaymath}\begin{gathered}\mathbf{Q}^T\mathbf{Q} = \mathbf{E}, \\ \mathbf{Q} = [\mathbf{Q}_n\vert \mathbf{Q}_c] , \end{gathered}\end{displaymath}](img887.png)
![$\displaystyle \mathbf{w}' = \mathbf{Q}^T \mathbf{w} = \left[\begin{array}{c} \m...
...w} = \left[\begin{array}{c} \mathbf{w}_n' \\ \mathbf{w}_c' \end{array}\right] .$](img894.png)
![$\displaystyle \mathbf{w} = \mathbf{Q} \mathbf{w}' = [\mathbf{Q}_n\vert \mathbf{...
...c' \end{array}\right] = \mathbf{Q}_n\mathbf{w}_n' + \mathbf{Q}_c\mathbf{w}_c' .$](img895.png)
![\begin{equation*}\begin{aligned}e[n] &= \mathbf{w}^T[n] \mathbf{x}[n] = (\mathbf...
... \\ \mathbf{x}'[n] &= \mathbf{Q}_c^T \mathbf{x}[n]. \end{aligned}\end{equation*}](img903.png)
![$\displaystyle \frac{\partial e^2[n]}{\partial \mathbf{w}_c'[n]} = 2 e[n] \frac{\partial e[n]}{\partial \mathbf{w}_c'[n]} = 2 e[n] \mathbf{x}'[n]$](img905.png)
![\begin{table}\noindent\framebox[16cm]{\vbox{%
\begin{tabbing}%
\hspace*{1cm}\=\h...
...] = \mathbf{w}_c'[n] - \mu e[n] \mathbf{x}'[n]$
\\
\end{tabbing}}}\end{table}](img907.png)