Než budeme cokoliv odhadovat musíme si nejprve vygenerovat nějaký
zajímavý signál, na kterém naše odhady budeme zkoušet.
Náš signál definujeme jako signál ![]() na výstupu filtru uvedeného
na Obr. 1.1 při buzení (signál
na výstupu filtru uvedeného
na Obr. 1.1 při buzení (signál ![]() )
bílým stacionární gusovským procesem s nulovou
střední hodnotou a rozptylem jedna.
)
bílým stacionární gusovským procesem s nulovou
střední hodnotou a rozptylem jedna.
Jelikož umíme pracovat pouze
s posloupnostmi konečné délky omezíme se na náhodný vektor délky
![]() (s identicky normálně rozloženými složkami, kde normální rozdělení
má nulovou střední hodnotu a rozptyl jedna). Takový jednoduše
získáme použitím randn(N,1).
(s identicky normálně rozloženými složkami, kde normální rozdělení
má nulovou střední hodnotu a rozptyl jedna). Takový jednoduše
získáme použitím randn(N,1).
Cvičení 1.0: Vaším úkolem je vygenerovat ![]() ,
,
![]() , za předpokladu že
, za předpokladu že
![]() (počáteční podmínky).
(počáteční podmínky).
Zkuste si napsat skript pro generování signálu ![]() sami.
Až když budete mít potíže, prohlédněte si následující skript.
sami.
Až když budete mít potíže, prohlédněte si následující skript.
% genx.m
N = 2000;
L = 1000;
v = randn(N,1);
x = zeros(N,1);
k1 = 0.9;
k2 = 0.5;
x(1) = v(1)*k2; % index -1 by vyvolal chybu, musime resit zvlast
for n = 2:N
if n == L+1
k1 = 0.0;
k2 = 1.0;
end
x(n) = k1*x(n-1) + k2*v(n);
end
Takto by to asi napsal čtenář předchozího úvodu.
Lze to zapsat take jednodušeji použitím funkce filter(B,A,u).
Vstupní parametry B, resp. A mají význam koeficientů polynomů
čitatele resp. jmenovatele přenosové funkce, viz. help filter.
Nejdříve tedy musíme zjistit jaký vztah májí koeficienty 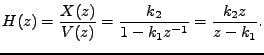
s = [ filter([0.5, 0],[1,-0.9],v(1:L)); filter([1, 0],[1, 0],v(L+1:N)) ];
Cvičení 1.1: Nyní si průběhy ![]() a
a ![]() vyneste.
vyneste.
To můžeme udělat např. přidámím těchto řádků k genx.m:
figure(1) % budeme kreslit do obrazku 1
plot(1:N,v,'b'); % horizontalni souradnice vynasenych bodu,
% vertikalni souradnice vynasenych bodu, barva
hold on % prubehy budou kresleny "pres sebe"
plot(1:N,x,'r');
hold off % vypnuti kresleni "pres sebe"
xlabel('n'); % popisy os
ylabel('x[n],v[n]');
title('namodelovany signal x[n] (cervene)');
Momenty definujeme pomocí operátoru střední hodnoty
![]() 1.2.
1.2.
Střední hodnotu náhodného procesu ![]() n čase
n čase ![]() značíme
značíme ![]() .
Pro stacionární proces se momenty s časem nemění a platí tedy
.
Pro stacionární proces se momenty s časem nemění a platí tedy
![]() , značení se pak většinou
zjednodušuje na
, značení se pak většinou
zjednodušuje na
![]() .
.
Dále budeme předpokládat nulové střední hodnoty náhodných procesů
![]() ,
, ![]() , případně náhodných veličin
, případně náhodných veličin ![]() a
a ![]() .
Vzájemná korelace n. v.
.
Vzájemná korelace n. v. ![]() a
a ![]() definujeme jako
definujeme jako
![]() .
Matici vzájemných korelací náhodných procesů
.
Matici vzájemných korelací náhodných procesů
![]() a
a ![]() definujeme (zde uvádím pouze rozmě
r
definujeme (zde uvádím pouze rozmě
r ![]() )
)
![\begin{displaymath}
\mathbf{R}_{xy}[n] = \left[
\begin{array}{cc}
\mathrm{E}[x[n...
...{E}[x[n-1]y[n]] & \mathrm{E}[x[n-1]y[n-1]]
\end{array}\right].
\end{displaymath}](img119.png)
![\begin{displaymath}
\mathbf{R}_{xx}[n] = \left[
\begin{array}{cc}
\mathrm{E}[x[n...
...E}[x[n-1]x[n]] & \mathrm{E}[x[n-1]x[n-1]]
\end{array}\right].
\end{displaymath}](img120.png)
![\begin{displaymath}
\mathbf{R}_{xx} = \left[
\begin{array}{cc}
r_{xx,0} & r_{xx,1} \\
r_{xx,1} & r_{xx,0}
\end{array}\right]
\end{displaymath}](img121.png)
Momenty 3. a 4. řádu (
![]() ,
,
![]() ) budeme
používat k výpočtu kumulantů šikmosti
a špičatosti při slepé separaci signálů pomocí ICA
(Independent Component Analysis).
) budeme
používat k výpočtu kumulantů šikmosti
a špičatosti při slepé separaci signálů pomocí ICA
(Independent Component Analysis).
Jestliže je proces stacionární a ergodický lze jeho momenty odhadovat
průměrováním v čase. Velkou výhodou je, že si pak vystačíme pouze s
jedinou realizací.
Odhad daného momentu obdržíme tak, že operátor střední hodnoty
jednoduše nahradíme půměrem v čase.
Například střední hodnotu
![]() odhadneme jako
odhadneme jako
![]() ,
korelaci
,
korelaci
![]() odhadneme jako
odhadneme jako
![]() nebo moment vyššího řádu
nebo moment vyššího řádu
![]() odhadneme jako
odhadneme jako
![]() .
.
Při blokovém odhadu předpokládáme stacionaritu v rámci bloků typicky fixní délky. V rámci každého bloku odhadneme momenty průměrováním.
Cvičení 1.2: Odhadněte autokorelační matici ![]() blokovým odhadem. Použijte
bloky délky
blokovým odhadem. Použijte
bloky délky ![]() .
.
Řešení s for-cyklem:
M = 500; % délka bloku
B = floor(N/M); % počet bloků
rxx0 = zeros(B,1); % inicializace koeficientů Rxx
rxx1 = zeros(B,1);
for b = 1:B
for n= ((b-1)*M+2):M*b
rxx0(b) = rxx0(b) + x(n)^2/(M-1);
rxx1(b) = rxx1(b) + x(n)*x(n-1)/(M-1);
end
end
Řešení bez for-cyklu (pouze náhrada za vnitřní smyčku):
range = ((b-1)*M+2):M*b; X = [ x(range) , x(range-1) ]; Rxx = X'*X/(M-1); rxx0(b) = Rxx(1,1); rxx1(b) = Rxx(1,2);
Vynesení obrázků:
figure(2)
subplot(2,1,1) % subplot umoznuje dát více grafů do
% jednoho obrazku, 1. podgraf
plot(1:N,x,'b');
subplot(2,1,2) % 2. podgraf
plot(1,0,'b'); % jenom kvuli pouziti hold on
hold on
for b = 1:B
nz = (b-1)*M+1 ;
nk = M*b ;
plot([nz,nk],[rxx0(b),rxx0(b)],'b');
plot([nz,nk],[rxx1(b),rxx1(b)],'r');
end
hold off
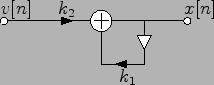
K odhadu střední hodnoty lze využít strukturu integrátoru na Obr. 1.4.
Otázka je jaká volba ![]() ,
,![]() poskytne dobrý odhad střední hodnoty.
Shrneme nejprve požadavky na frekvenční charakteristiku:
Frekvenční charakteristika by měla mít maximum na nulové frekvenci,
ostatní frekvence by měly být pokud možno potlačeny. Hodnota frekvenční
charakteristiky v tomto maximu by měla být jedna (chceme střední hodnotu a
ne nějaký násobek). Systém by měl být stabilní.
poskytne dobrý odhad střední hodnoty.
Shrneme nejprve požadavky na frekvenční charakteristiku:
Frekvenční charakteristika by měla mít maximum na nulové frekvenci,
ostatní frekvence by měly být pokud možno potlačeny. Hodnota frekvenční
charakteristiky v tomto maximu by měla být jedna (chceme střední hodnotu a
ne nějaký násobek). Systém by měl být stabilní.
Řešením této úlohy dojdeme k tomu, že možné hodnoty konstant
![]() ,
,![]() musí být reálné a dále musí splňovat podmínky
musí být reálné a dále musí splňovat podmínky
![]() , a
, a
![]() . Takovýto integrátor se nazývá
normalizovaný.
Obvykle se jeho koeficienty
značí
. Takovýto integrátor se nazývá
normalizovaný.
Obvykle se jeho koeficienty
značí ![]() místo
místo ![]() , a
, a
![]() místo
místo ![]() .
Odhad, který je jako zde aktualizován s každým novým
vzorkem budeme nazývat průběžný.
.
Odhad, který je jako zde aktualizován s každým novým
vzorkem budeme nazývat průběžný.
Cvičení 1.3: Zkuste najít správné řešení sami.
Cvičení 1.4: Vyneste si frekvenční charakteristiku, impulsovou odezvu a póly a nuly
v z-rovině pro různé hodnoty pro různé hodnoty ![]() ,
,![]() .
.
Implulsovou odezvu vypočtete jednoduše pomocí funkce filter 1.3 nebo impz. Dále můžete použít následující funkce Matlabu.
Poznámka: Takovouto funkci si jednoduše můžete vytvořit sami. Stačí když si vzpomenete, že frekvenční charakteristika (systému diskrétního v čase) je vlastně přenosová funkce vyčíslená na jednotkové kružnici. pro integrátor by to dopadlo takto:
H = zeros(length(W),1); % length vraci velikost vektoru for k = 1:length(W) z = exp(j*W(k)); H(k) = k2*z/(z-k1); endNebo trochu zhuštěně:
z = exp(j*W);
H = k2*z ./ (z-k1); % vyznam operatoru "./",".*",".^" je, ze operace
% se provadi prvek po prvku, operandy pak musi
% byt matice stejneho rozmeru, vyzkousekjte si
![\includegraphics[width=10cm]{ada1/obrmat/fig3.ps}](img139.png)
![\includegraphics[width=10cm]{ada1/obrmat/fig10.ps}](img140.png)
|
Cvičení 1.5: Odhadněte autokorelační matici ![]() průběžným odhadem pomocí
normalizovaného integrátoru. Vyzkoušejte vliv
průběžným odhadem pomocí
normalizovaného integrátoru. Vyzkoušejte vliv ![]() na odhad
(volte např.
na odhad
(volte např.
![]() ).
).
Řešení:
lambda = 0.995; % koeficienty normalizovaneho integratoru k1 = lambda; k2 = 1-lambda; rxx0 = zeros(N,1); rxx1 = zeros(N,1); rxx0(1) = k2*x(n)^2; rxx1(1) = k2*x(n)*x(n-1); for n= 2:N rxx0(n) = k1*rxx0(n-1) + k2*x(n)^2; rxx1(n) = k1*rxx1(n-1) + k2*x(n)*x(n-1); end
![\includegraphics[width=10cm]{ada1/obrmat/fig1.ps}](img109.png)
![\includegraphics[width=10cm]{ada1/obrmat/fig2.ps}](img132.png)
![\includegraphics[width=10cm]{ada1/obrmat/fig5.ps}](img142.png)